Machine Design
Engineers at the Naval Research Laboratory are developing an autonomous underwater vehicle (AUV) that mimics the motions and actions of a reef fish, the bird wrasse. The goal is to have an AUV that can navigate and maneuver through coastal waters, a low-speed task that requires agility and the ability to detect and determine the surrounding environment. The Navy already has UAVs suited to high-speed, long-distance missions in open waters. Now it wants similar capabilities for coastal waters which are cluttered with obstacles and plagued with dynamically changing currents.
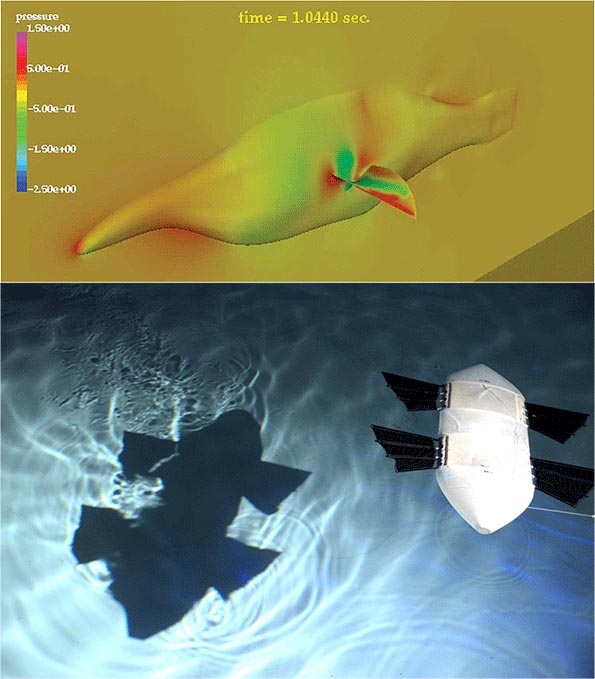 |
| Researchers at the U.S. Naval Research Laboratory modeled the geometry of the bird wrasse, a fish, using CFD then validated the data against experimental results (above). The results (below) were four artificial pectoral fin, two forward and two aft, that provide propulsion and control necessary for a Navy underwater robot. (Photo: U.S. Naval Research Laboratory/Jamie Hartman) |
The engineering team sought inspiration from nature and ended up building an actively controlled, curved robotic fin modeled after the pectoral fins of the wrasse. They installed four such fins on their robotic fish, a pair forward and a pair aft, and named the robot the wrasse-inspired agile near-shore deformable-fin automaton, Wanda (in honor of the 1988 movie, A Fish called Wanda?)
Fin-control algorithms take data on the robot’s motion, surrounding environment, and the preprogrammed target position to determine the proper fin motions. So far, technicians can program the AUV to move forward and back, up and down, turn in place, and hold station in water moving at two knots. The robot can also coordinate maneuvers to carry out waypoint navigation (going from point to point unaided).
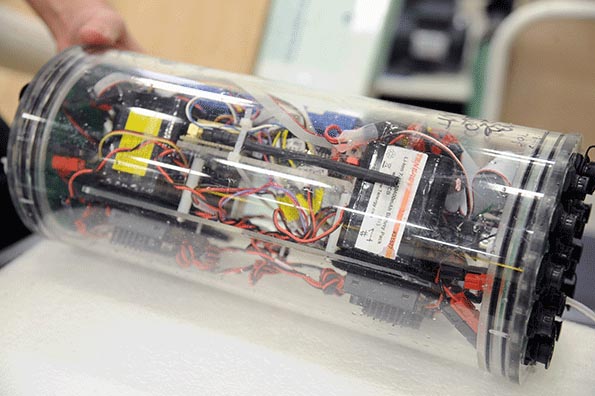 |
| Inside the Navy’s new underwater drone, a watertight electronics pressure vessel houses the power source, microcontroller, navigation and monitoring sensors, and communications hardware. Watertight connectors on the pressure vessel connect the electronics to fin actuators and external sensors. (Photo: U.S. Naval Research Laboratory/Jamie Hartman) |
The project team now goes onto payload testing. The first modular will sense biochemical agents and its outputs will be used to command Wanda to swim along the trail or plume of chemicals towards its source. They are also building follow-on robots that use the same fins for aerodynamic control. This will let the Navy deploy the AUV from the air so it will glide to the surface of the water, land, then submerge.
