Todd Borkowski
EDN
The following is a Sand 9 white paper discussing the evolution of MEMS technology in our industry as it relates to timing devices. Quartz has dominated the industry until recently. Electrostatic and piezoelectric MEMS now seriously compete to displace quartz in many applications with improved overall tolerance across all frequencies. PSRR in a MEMS differential clock vs. quartz is better over frequency. Jitter and reliability also have MEMS as a winner in those categories. Read on about the market changes with this exciting technology using MEMS.
The classic crystal oscillator, using a quartz resonator as its core element, has served the electronics industry well for almost 100 years. But this is a market ready for disruption, and quartz is facing challenges from an alternative approach based on MEMS (micro-electromechanical systems) resonator technology.
Within the MEMS industry, there are two different technologies competing to displace quartz – one based upon electrostatic actuation, and the other based upon piezoelectric actuation. Understanding the pros and cons of each approach starts with acknowledging the technical challenge with displacing quartz.
The MEMS challenge
The broad benefit of MEMS technology is that it will allow high-volume, small-package technology and batch semiconductor manufacturing to replace the complex manufacturing processes associated with quartz. Since the final product is a silicon die, MEMS can be co-packaged (overmolded) with associated ICs, enabling further benefits in manufacturability, size, compatibly, ease-of-use, and, of course, lower total system cost. Finally, MEMS is more immune to shock, vibration, and electromagnetic interference (EMI) than quartz; can be designed to be free of “activity dips”; and can support operating temperature ranges beyond -40°C to +85°C.
However, quartz timing devices have a long and successful history. It is a mature, highly refined technology with a key advantage that MEMS devices must overcome: quartz material is inherently very stable versus temperature, an important consideration for a device that must operate over a typical temperature range of -40°C to +85°C. In contrast, silicon is at the core of a MEMS device and is a material that softens with temperature, leading to shifts in frequency – a critical parameter – that is not acceptable in many applications.
The amount of frequency drift that can be tolerated depends on the product and market, of course. Applications such as industrial and mobile connectivity have different requirements than, for example, communications infrastructure. A timing circuit in a mobile application may require ±2.5 parts per million (ppm) accuracy from -30°C to +85°C, while less demanding applications can accept temperature drift between ±50 and ±100 ppm.
Besides frequency stability, jitter (and its closely related parameter, “phase noise”) is another critical parameter for timing devices. Jitter is essentially a measure of minute, random variations in output around the nominal frequency.
Users are also concerned with how high the “native” reference frequency of an oscillator can extend, in order to minimize the amount of additional scaling needed to reach the required operating frequency. The more they have to scale a reference frequency, the greater the resulting noise contribution and the greater the performance degradation. Adding extra circuitry to the oscillator can allow it to operate at harmonics (overtones) of the base frequency, but it also increases jitter, compared to the fundamental mode.
Finally, in a world where so many products are battery-powered and every milliwatt is critical, users consider the component’s power consumption vitally important. In many designs, there are limits on available power as well as concerns with dissipating the associated heat.
MEMS in two variations: electrostatic versus piezoelectric
 |
|
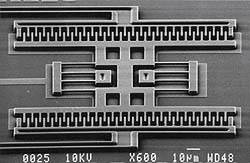
| Figure 1. | The electrostatic technique for building a MEMS resonator uses an electric field interacting with a moving element. |
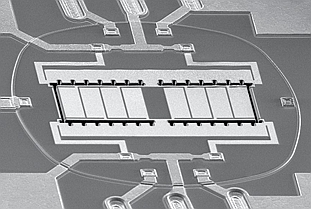
There are two distinct design approaches to building MEMS-based timing devices: electrostatic and piezoelectric. In the first, a movable silicon MEMS element interacts with the carefully controlled electric field surrounding it. This electrostatic, or capacitive actuation, results in the core of the MEMS resonator performance (Figure 1). In the second, the MEMS resonator uses piezoelectric actuation to convert mechanical motion and stress to an electrical signal, and vice versa (Figure 2).
 |
|
| Figure 2. | The piezoelectric approach is based on a long-established principle of material stress and voltage, and offers the potential for improved resonator performance. |
Given the significant benefits of MEMS over quartz, how can we evaluate the two different, sophisticated approaches to achieving high stability, low noise, and low current consumption to displace quartz?
Regarding the first challenge to displacing quartz – achieving high frequency stability over temperature – electrostatic MEMS designers typically implement a digital synthesizer on the oscillator circuit to compensate for over 3000 ppm of drift over -40°C to +85°C. While this technique effectively addresses drift, it unfortunately has a downside: It introduces significant additional jitter and phase noise as well as increased current consumption, often beyond what higher-end applications can accept.
In contrast, piezoelectric MEMS manufacturers such as Sand 9 address drift by using a combination of techniques that yield better jitter and phase noise performance than synthesizer compensation. First, the piezoelectric MEMS resonator – a monolithic element – is laminated with a layer of silicon dioxide (SiO2) on both sides, which hardens the element and reduces drift by more than an order of magnitude. Second, associated oscillator circuitry incorporates an analog compensation loop, which is both faster than a digital synthesizer and also introduces far less phase noise and jitter. A well-designed MEMS oscillator such as from Sand 9 can achieve ±5 ppm and better stability over -40°C to +85°C, comparable to quartz designs, (Figure 3).
 |
|
| Figure 3. | The normalized frequency drift of the compensated Sand 9 device is comparable to quartz, over the entire range of operating temperature. |
Another critical parameter is the oscillator’s initial frequency offset from its ideal “correct” value, an unavoidable production-tolerance factor. The electrostatic approach of using a synthesizer to compensate for drift also can be adapted by the device vendor to calibrate out the initial offset. Doing so, however, comes at a cost of further degradation in jitter and phase noise as well as increased current consumption.
In contrast, the piezoelectric approach has three options to correct the initial frequency offset. It can be corrected either by integrating a synthesizer or by trimming the MEMS – both of which are valid, depending upon application requirements. The third option is to simply leave the initial frequency offset as is. This works because there are several precision timing applications where synthesizers are already either external to or integrated with another IC in the signal chain. Since the first priority for many high-end designs is to have the best possible performance from the frequency source, those synthesizers can also adjust the initial frequency offset.
When considering jitter/phase noise and power consumption, the electrostatic architecture has unavoidable low coupling between its mechanical and electrical modes, resulting in inefficient energy conversion. The energy coupling of the electrostatic design is about one-hundredth that of the piezoelectric design. The result is lower signal-to-noise ratio (SNR) and inferior jitter/phase noise at the output.
To compensate for lower SNR and to raise performance, the electrostatic device must be larger in size, driven with more power, or both; thus, the completed electrostatic device requires significantly more current than a comparable piezoelectric device. Higher current renders the electrostatic device unsuitable as a cellular transceiver reference, and despite consuming more current, it is still unable to deliver the low jitter/phase noise for precision timing applications in, for example, communications infrastructure equipment (Figure 4).
 |
|
| Figure 4. | LTE transmitter error vector magnitude versus attenuation for both Sand 9 MEMS and quartz shows comparable performance despite the differences in size and cost. |
Native frequency range is another area where the results of electrostatic and piezoelectric implementations differ greatly. Typical electrostatic designs in the market today can reach about 48 to 50 MHz in fundamental mode, while piezoelectric designs such as Sand 9’s can go to 125 MHz and higher. Using non-fundamental harmonic modes can extend the achievable range of the electrostatic design, but at a severe cost in degraded jitter/phase noise and SNR.
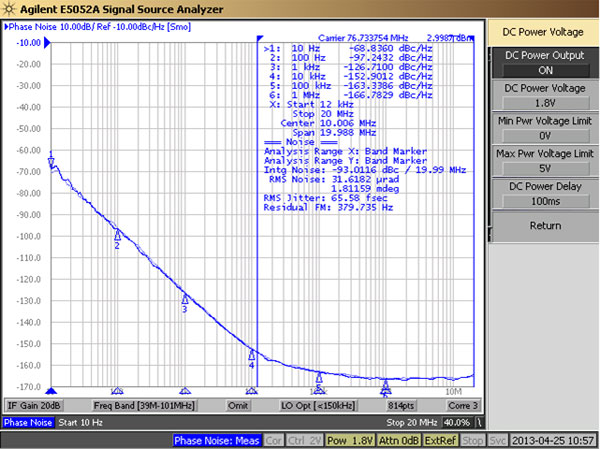
Some electrostatic designs try to reach higher native-mode frequencies by further shrinking the size of their core element, thus raising its natural frequency. However, the corresponding decrease in surface area also decreases the electromechanical energy coupling, thus reducing power efficiency and increasing jitter/phase noise. Note that a piezoelectric resonator such as the one being developed by Sand 9 can achieve -127 dBc/Hz phase noise when paired with a typical 1.8V oscillator (Figure 5).
 |
|
| Figure 5. | When paired with a typical 1.8V oscillator, Sand 9 resonator achieves cellular transceiver, GPS/GNSS, and wireless connectivity phase noise requirements for mobile devices. |
Conclusion
MEMS oscillators provide a compelling, innovative alterative to long-established devices based on quartz in many timing applications. The two approaches available for realizing these MEMS designs are both suitable for competing with quartz but differ significantly in their capabilities and market potential.
Major advances in MEMS technology, coupled with the inherent advantages of a piezoelectric approach, give it an increasingly strong competitive position against quartz. MEMS-based oscillators can provide the high stability, low noise, low power consumption, and wider native-frequency range that are critical for many precision timing applications, while also addressing many of quartz’s deficiencies.